
News
Le Deep Learning pour l’Aérospatiale Le projet DELTA à l’ONERA
De la propulsion à la conception des formes d’avions en passant par le développement de matériaux composites, le domaine aérospatial rassemble de nombreux domaines scientifiques et une grande variété de métiers. Il est aussi caractérisé par des exigences fortes et une certification minutieuse afin d’assurer la sécurité et la pérennité des systèmes volants. Dans ce contexte, de nombreuses données sont générées tout au long de la vie du système par des simulations pendant la phase de conception, ou par des capteurs lors de l’exploitation. Cette culture de la donnée est aujourd’hui une opportunité pour l’utilisation de technologies et de méthodes émergentes telles que les Data Sciences dont l’apprentissage automatique et le Deep Learning.
Deep Learning
L’apprentissage automatique (ou statistique) est une branche de l’intelligence artificielle consistant à extraire automatiquement de l’information des données disponibles afin d’adapter un modèle générique, souvent paramétrique, à une tâche particulière. Au cours des dernières décennies, de nombreux modèles d’apprentissage automatique ont été développés, incluant les Machines à Vecteurs Support [1], les arbres de décisions [2] ou encore les réseaux de neurones [3]. .
Le Deep Learning, ou apprentissage profond, est l’utilisation de réseaux de neurones de très grande taille (jusqu’à plusieurs millions de paramètres). Depuis le début des années 2000, l’accès facilité à de grandes quantités de données, l’évolution des moyens de calculs, notamment les Graphical Processing Units (GPU ou carte graphiques) et le développement d’environnements logiciels spécialisés ont permis l’essor récent de ces méthodes. Dès lors, la recherche théorique très active en optimisation statistique et algorithmie a permis d’étendre l’application du Deep Learning à de nombreux nouveaux domaines, en créant de nouvelles architectures de réseaux et de nouveaux types de neurones.
Historiquement porté par les domaines de la vision par ordinateur (reconnaissance d’image) et le traitement du langage naturel, l’apprentissage profond est aujourd’hui utilisé dans un large spectre de domaines scientifiques et technologiques, incluant la médecine, l’intelligence artificielle pour les jeux (Alpha Go [6]), les assistants virtuels ou les voitures autonomes.
Le projet DELTA de l’ONERA
Le domaine aérospatial produit, analyse et capitalise de très grande quantités de données et ce depuis de nombreuses années. Il apparaît alors naturel de transformer ce constat en opportunité et d’étudier comment y exploiter avec profit les technologies d’apprentissage.
Dans ce contexte, l’ONERA a initié le projet de recherche DELTA qui vise à explorer l’utilisation du Deep Learning pour divers domaines de l’aéronautique et de l’espace. Ce projet d’ampleur a pour objectif d’initier une dynamique autour de l’apprentissage basé sur les données. Mené par le département Traitement de l’Information et Système, il associe l’ensemble des départements scientifiques de l’ONERA: mécanique des matériaux, mécanique des fluides, électromagnétisme et optique.
L’objectif de ce projet est autant d’innover par des travaux de recherche amont que d’appliquer l’existant aux problématiques et spécificités du domaine aérospatial, notamment l’adaptation à la grande variété de données, la conception de stratégies de traitement lorsque ces données sont corrompues, incomplètes, en faible quantité, et/ou pauvrement annotées.
Résultats
Les premiers résultats ont démontré l’intérêt du Deep Learning pour la métrologie par imagerie, la robotique et la télédétection.
La segmentation sémantique pour la robotique ou la télédétection est aujourd’hui performante (voir encadré). Pour la navigation autonome, l’appréhension de l’environnement 3D (voir encadré), c’est-à-dire l’estimation des distances des objets au drone, est aussi accessible, même avec une seule caméra [7]. De même, les travaux en cours sur la détection de fissures pour des matériaux composites tendent à montrer la pertinence de l’apprentissage pour leur localisation et l’extraction de leurs caractéristiques. Enfin, la compréhension de la combustion du propergol solide pourrait s’accélérer par l’application du Deep Learning aux images par ombroscopie [14] (voir encadré), processus d’imagerie permettant de visualiser l’indice de réfraction du milieu observé.
De plus, les questions posées sur le type, le nombre et la qualité des données ont ouvert des travaux sur les architectures de réseaux de neurones proprement dites [8], leur robustesse à des variations dans les données [9], la génération de données [10], l’apprentissage de nouvelles classes [11] (notamment par zero-shot learning, approche consistant à essayer de reconnaître des classes n’ayant pas été vues à l’apprentissage) ou semi-supervisé (lorsque toutes les données d’entraînement ne sont pas labélisées).
Le futur en quelques questions
Au-delà de l’application du Deep Learning à de nouvelles problématiques, le futur de DELTA est de fédérer la réflexion sur l’utilisation de modèles physiques dans une chaîne de traitement basée données (c’est-à-dire utilisant les données pour régler ses paramètres) et sur la qualification de réseaux de neurones dans des contextes physiques. Par exemple, la question de savoir utiliser de l’apprentissage au sein d’une simulation physique (pour compenser un modèle incertain ou trop coûteux en temps de calcul) tout en continuant à maîtriser la précision sous-jacente est une attente centrale en mécanique des fluides.
Un autre défi est celui de la faible quantité de données renseignées utilisables pour l’apprentissage automatique, situation courante en raison du coût élevé de la tâche d’annotation. “ Quelles quantité et qualité d’annotations sont nécessaires pour apprendre ? Peut-on extraire de l’information des données non annotées? ” sont des interrogations qui animent aujourd’hui les chercheurs de l’ONERA.
Enfin, la conception d’une méthodologie permettant de garantir, voire de certifier, les algorithmes à base d’apprentissage, gage de leur maturité, apparaît nécessaire pour permettre leur utilisation applicative sûre. Une question cruciale est alors celle de l’interprétabilité [15] et de la robustesse des approches de Deep Learning dont le fonctionnement demeure encore très opaque.
Ces récentes avancées de l’intelligence artificielle invitent à un effort du monde académique mais aussi industriel pour propager cette rupture technologique dans le domaine de l’aéronautique et de l’espace. Une voie dans laquelle l’ONERA s’est engagé.
Encadré :
Segmentation sémantique
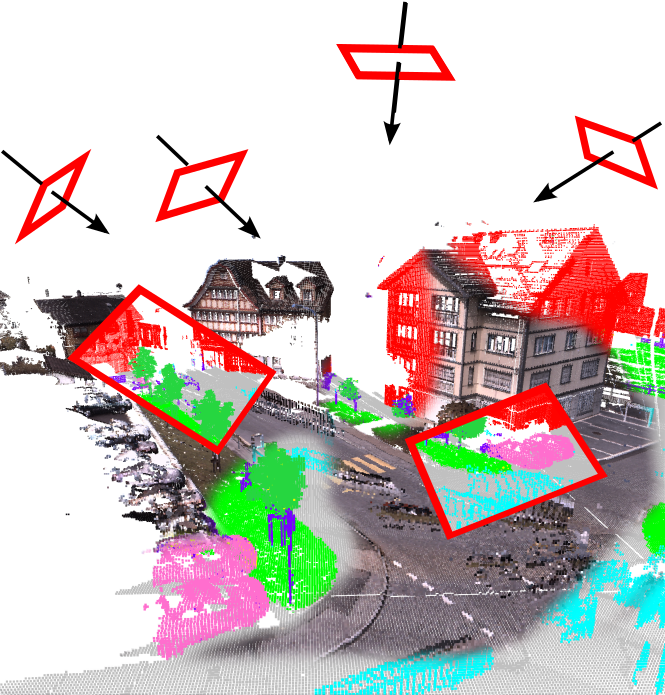
La segmentation sémantique a pour but de donner une classe à chaque élément de la scène : à chaque pixel pour une image ou encore à chaque point dans un nuage de points. Dans le cadre du projet DELTA, des travaux de cartographie sémantique à partir d’images aériennes ou de nuages de points laser sont menés.
Un exemple de transfert de connaissance entre deux types de données est montré figure 2. En utilisant le savoir faire acquis sur le traitement d’images, la segmentation de données 3D est accessibles en simulant des prises de vue (images) dans une scène 3D [13]. La segmentation est effectuée sur les images virtuelles et reprojetée sur le nuage de points.
Application aux images d’ombroscopies
L’utilisation de réseau de neurones permet de caractériser assez finement les objets observées par ombroscopie lors de la combustion du propergol (90 % sur une base ONERA). Cela permet notamment d’estimer la granulométrie réelle utile pour calibrer les modèles de simulation.
L’utilisation de réseau de neurones permet de caractériser assez finement les objets observées par ombroscopie lors de la combustion du propergol (90 % sur une base ONERA). Cela permet notamment d’estimer la granulométrie réelle utile pour calibrer les modèles de simulation.
Bibliographie
[1] Cortes, C., & Vapnik, V. (1995). Support-vector networks. Machine learning, 20(3), 273-297.
[2] Breiman, L., Friedman, J., Olshen, R., & Stone, C. (1984). Classification and Regression T rees (Monterey, California: Wadsworth).
[3] Bishop, C. M. (1995). Neural networks for pattern recognition. Oxford university press.
[4] LeCun, Y., Bengio, Y., & Hinton, G. (2015). Deep learning. Nature, 521(7553), 436.
[5] Schmidhuber, J. (2015). Deep learning in neural networks: An overview. Neural networks, 61, 85-117.
[6] Silver, D., Schrittwieser, J., Simonyan, K., Antonoglou, I., Huang, A., Guez, A., ... & Chen, Y. (2017). Mastering the game of Go without human knowledge. Nature, 550(7676), 354.
Sélection de travaux publiés dans DELTA
[7] Carvalho, M., Le Saux, B., Trouvé-Peloux, P., Almansa, A., & Champagnat, F. (2018, October). On regression losses for deep depth estimation. In 2018 25th IEEE International Conference on Image Processing (ICIP) (pp. 2915-2919). IEEE.
[8] Boulch, A. (2018). ShaResNet: reducing residual network parameter number by sharingweights. Pattern Recognition Letters, page-53.
[9] Chan-Hon-Tong A. (2018). An Algorithm for Generating Invisible Data Poisoning Using Adversarial Noise That Breaks Image Classification Deep Learning. Machine Learning and Knowledge Extraction, 1(1), 192-204.
[10] Audebert, N., Saux, B. L., & Lefèvre, S. (2018). Generative Adversarial Networks for Realistic Synthesis of Hyperspectral Samples. arXiv preprint arXiv:1806.02583.
[11] Bucher, M., Herbin, S., & Jurie, F. (2016, October). Improving semantic embedding consistency by metric learning for zero-shot classiffication. In European Conference on Computer Vision (pp. 730-746). Springer, Cham.
[12] Audebert, N., Le Saux, B., & Lefèvre, S. (2016, November). Semantic segmentation of earth observation data using multimodal and multi-scale deep networks. In Asian Conference on Computer Vision (pp. 180-196). Springer, Cham.
[13] Boulch, A., Guerry, J., Le Saux, B., & Audebert, N. (2018). SnapNet: 3D point cloud semantic labeling with 2D deep segmentation networks. Computers & Graphics, 71, 189-198.
[14] Nugue, M., Devillers, R. W., Tong, A. C. H., Le Besnerais, G., & Pichillou, J. (2017, September). Classification automatique d’images de propergol solide en combustion par utilisation de réseaux de neurones convolutifs. In GRETSI 2017.
[15] Bucher, M., Herbin, S., & Jurie, F. (2018, December). Semantic bottleneck for computer vision tasks. In Asian Conference on Computer Vision (ACCV).



Aucun commentaire
Vous devez être connecté pour laisser un commentaire. Connectez-vous.